機器人打磨 採用 RoboDK 進行離線編程
#RoboDK#離線編程#機器人打磨
打磨是一門結合體力與技術的工藝。面對高噪音與粉塵環境,不是人人都有辦法持續維持高品質的加工產出。儘管廉價勞力不難取得,但能長期穩定掌握打磨技術的師傅卻難以複製。因此,讓機器人學會並延續這項技藝,不只是效率的提升,更是工藝的傳承。及仁科技所推出的 AGS 機器人打磨系統,正是針對這項需求而打造的解決方案。
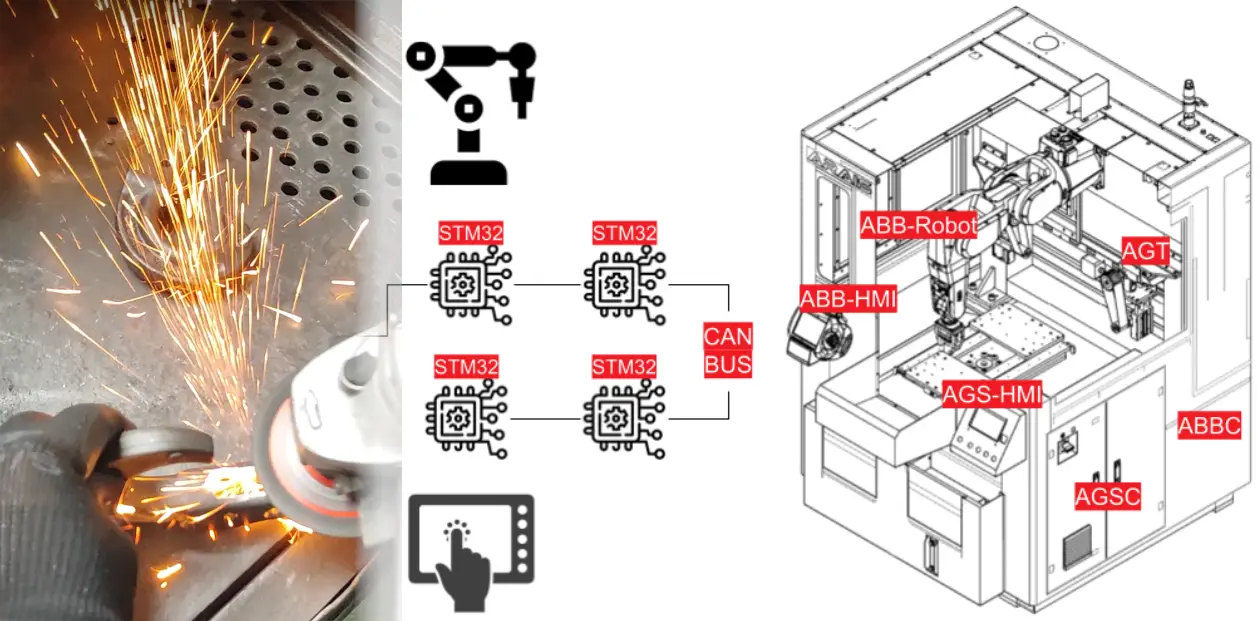
及仁 AGS 機器人工作站採用全封閉式機殼設計,兼具操作安全與粉塵隔離的功能,機械手可自動執行連續取料與打磨作業,實現全天候的自動化生產。在密閉腔體內,機械手的每一次移動皆須避開設備結構並準確執行每一道打磨動作,這正是 RoboDK 所提供的自動避障功能與路徑規劃算法發揮關鍵作用的地方。透過離線編程與模擬驗證,使機械手開發流程更為安全穩定,並大幅縮短打磨工藝導入的週期。
RoboDK to AGS 打磨調適流程說明
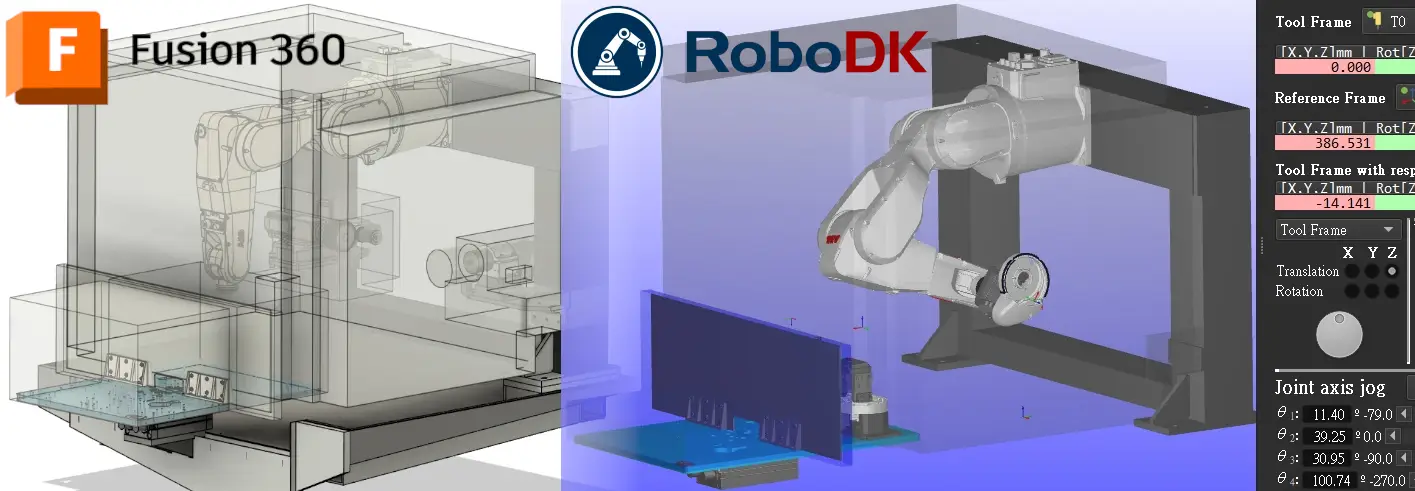
使用 CAD 設計夾治具與工件模型,例:Autodesk Fusion 360
為不同工件打造專用夾具,確保工件夾持牢靠,提升加工穩定性與品質一致性。
匯入模型至 RoboDK 以建構機械手模擬環境
在 RoboDK 中整合工件、夾具、機械手與打磨設備模型,建立虛擬加工環境。
在 Fusion 中繪製打磨調適軌跡
直接在工件曲面上繪製打磨軌跡,結合使用者工藝知識進行路徑規劃。
打磨調適軌跡匯至 RoboDK 模擬加工動作
模擬驗證機械手打磨姿勢與路徑串接移動範圍,並避開可能干涉區域。
調整每段打磨路徑的出力與速度
根據工件曲率、材質與表面需求微調打磨參數。
使用 RDK2AGS 後處理程式將 RoboDK 產生的機械手程式匯出至 AGS 機台
透過及仁科技開發的 RDK2AGS 工具,將 RoboDK 模擬結果轉換為實機可執行程式。
於 AGS 機台進行實機打磨量產驗證
啟動自動打磨流程,實際觀察加工效果並確認量產打磨參數。